RH134小结(二)进程优先级
Linux中由于需运行的进程数超过实际具有的物理核心数,所以其运用了时间片技术,操作系统进程通过调度上在每个单核心的CPU上快速的进行进程任务的切换,由于这个切换速度相当快,用户感知不到,从而使用户感觉同时有多个任务同时在运行。执行此切换的LINUX内核部分称为进程调度程序。
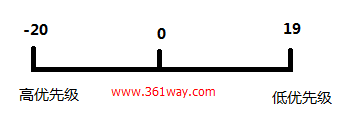
系统中运行的每个进程优先范围从 -20 (最高优先级)到 19 (最低优先级)。默认情况下,进程的优先级是 0 (“基本”调度优先级)。优先级比较大的进程(nice 值比较小,最低到 -20)相对优先级比较小的进程(直到 19)将比较频繁地被调度运行,因此就拥有更多的进程周期。一般用户只能降低它们自己进程的优先级别,并限于 0 到 19 之间。超级用户(root)可以将任何进程的优先级设定为任何值。便于理解,我简单画了个图,如下:
一、查看nice值
上面提到的值我们习惯称之为nice (low priority user mode),我们可以通过两个最常见的命令top、ps查看nice值 。具体示例如下:
1、top查看
1[root@361way ~]# top
2top - 23:30:07 up 151 days, 23:56, 4 users, load average: 0.10, 0.06, 0.01
3Tasks: 88 total, 1 running, 87 sleeping, 0 stopped, 0 zombie
4Cpu(s): 5.5%us, 0.5%sy, 0.0%ni, 93.9%id, 0.2%wa, 0.0%hi, 0.0%si, 0.0%st
5Mem: 1019648k total, 944588k used, 75060k free, 221696k buffers
6Swap: 0k total, 0k used, 0k free, 308876k cached
7 PID USER PR NI VIRT RES SHR S %CPU %MEM TIME+ COMMAND
8 1 root 20 0 19232 572 276 S 0.0 0.1 0:01.30 init
9 2 root 20 0 0 0 0 S 0.0 0.0 0:00.00 kthreadd
10 3 root RT 0 0 0 0 S 0.0 0.0 0:00.00 migration/0
11 4 root 20 0 0 0 0 S 0.0 0.0 1:16.64 ksoftirqd/0
12 5 root RT 0 0 0 0 S 0.0 0.0 0:00.00 stopper/0
13 6 root RT 0 0 0 0 S 0.0 0.0 0:29.00 watchdog/0
14 7 root 20 0 0 0 0 S 0.0 0.0 11:43.55 events/0
15 8 root 20 0 0 0 0 S 0.0 0.0 0:00.00 cgroup
16 9 root 20 0 0 0 0 S 0.0 0.0 0:03.06 khelper
17 10 root 20 0 0 0 0 S 0.0 0.0 0:00.00 netns
18 11 root 20 0 0 0 0 S 0.0 0.0 0:00.00 async/mgr
19……………………省略
2、ps查看
1[root@361way ~]# ps lax
2F UID PID PPID PRI NI VSZ RSS WCHAN STAT TTY TIME COMMAND
34 0 1 0 20 0 19232 572 poll_s Ss ? 0:01 /sbin/init
41 0 2 0 20 0 0 0 kthrea S ? 0:00 [kthreadd]
51 0 3 2 -100 - 0 0 migrat S ? 0:00 [migration/0]
61 0 4 2 20 0 0 0 ksofti S ? 1:16 [ksoftirqd/0]
71 0 5 2 -100 - 0 0 cpu_st S ? 0:00 [stopper/0]
85 0 6 2 -100 - 0 0 watchd S ? 0:29 [watchdog/0]
91 0 7 2 20 0 0 0 worker S ? 11:43 [events/0]
101 0 8 2 20 0 0 0 worker S ? 0:00 [cgroup]
111 0 9 2 20 0 0 0 worker S ? 0:03 [khelper]
121 0 10 2 20 0 0 0 worker S ? 0:00 [netns]
131 0 11 2 20 0 0 0 async_ S ? 0:00 [async/mgr]
141 0 12 2 20 0 0 0 worker S ? 0:00 [pm]
155 0 13 2 20 0 0 0 xenwat S ? 0:00 [xenwatch]
161 0 14 2 20 0 0 0 xb_wai S ? 0:00 [xenbus]
17……………………省略
ps命令里增加l (long)参数可以查看NI项,即nice优先级值 。通过其内置的sort参数也可以对进程优先级进行排序,如下:
1[root@361way ~]# ps axo pid,comm,nice --sort=nice
2 PID COMMAND NI
3 321 udevd -4
4 1 init 0
5 2 kthreadd 0
6 3 migration/0 -
7 4 ksoftirqd/0 0
8 5 stopper/0 -
9 6 watchdog/0 -
10 7 events/0 0
11 8 cgroup 0
12 9 khelper 0
13 10 netns 0
14 11 async/mgr 0
15 12 pm 0
3、PRI与NI
细心的同学估计会观察到,无论是top还是ps 里都有一个PRI 项,该值与NI值之间是什么关系呢?
我们可以理解为PRI 值是映射的NI 值, PRI 和 NI 值,都会影响进程执行的优先级 。Priority/PRI 由 OS 内核动态调整,用户不能调整(PRI 值越低,进程执行的优先级越高);Nice/NI 用户可以自己调整;相互关系:有个一般公式,PRI(new) = PRI(old) + NI ;但是,PRI 是 OS 动态调整的,但是 PRI 的最终值还需要由 OS 分析决定的(虽然 NI 会影响 PRI),详细部分可以参看下《鸟哥的LINUX私房菜》。便于理解,这里再给个图:
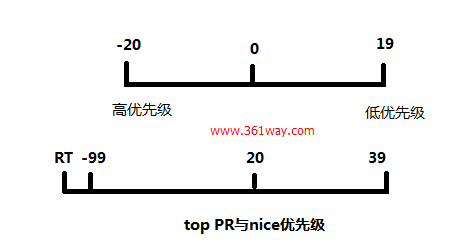
在RHCE-134 教材上给出了top PR值与nice的一个对应关系图,PRI 值的范围是RT\~39 ,在上面top和ps中的结果我们也看到,top中使用的最小值是RT,ps使用的-100,我们可以理解为其范围是-100~39 。上面也提到PRI是由OS自动调整的,所以两者之间的值,我们也近似的理解为PRI 20 等于NI 0 ,PRI RT 等于NI -20 优先级最高,PRI 39等于NI 19 优先级最低。
二、NI值的调整
NI 值的调整有两个相关指令,分别是nice 和 renice 。nice 命令用于在程序将要运行时,通过该指令改变其运行级别;renice是对于已经在运行的进程的优先级进行调整。
1、nice
由于进程在启动时,默认是通过继承其父进程的优先的级的,所以进程在启动时,优先级值是默认的。通过nice 修改优先级的指令如下:
1# nice <command>
2或
3# nice -n 优先级值 <command>
默认不加-n 指定时,使用的nice级别为10 ,假设这里让一个test.sh 脚本的运行级别为15 ,示例如下:
1# nice -n 15 sh test.sh &
2、renice
比如在一个现网环境中,经常会遇到某些进程或资源进入死循环或被入侵式调用时,出现某个用户下的进程大量占用资源,甚至造成主机夯机的情况下,就可以通过增大该进程的nice 级别,使其相关进程排在后面执行。示例如下:
1# renice -n 7 $(pgrep nginx)
上面的例子让所有nginx 进程的优先级设为7 。
注:在实际使用中也可以通过top 按r 设置进程的ni 值。
三、总结
更多信息可以查看 nice 、renice 、top、sched_setscheduler 相关的man 手册页面。更底层的东西是通过sched进行实现的,类似的像root用户之所以更换nice值为负,是因为其具有CAP_SYS_NICE 功能权限。
就像最上面我们提到的那样,操作系统(不仅仅是linux)的多任务执行,只不过是表象上的,实际运行中是多个进程共享一个cpu资源并根据需要进行切换使用的。实际应用一般不建议修改nice值 ,该值一般让OS自动去调节即可。比如有一个CPU密集型的运算的进程在执行,如果我们将其nice值设的很低,造成的结果是该进程总是被优先进行,而由于其CPU密集运算,导致CPU长期占用在100%的状态,在该进程执行完成前,其他进程几乎没有机会执行操作。这就会导致系统可能长时间无法响应其他应用调用需求。
捐赠本站(Donate)
 如您感觉文章有用,可扫码捐赠本站!(If the article useful, you can scan the QR code to donate))
如您感觉文章有用,可扫码捐赠本站!(If the article useful, you can scan the QR code to donate))
- Author: shisekong
- Link: https://blog.361way.com/rh134-nice-renice/4636.html
- License: This work is under a 知识共享署名-非商业性使用-禁止演绎 4.0 国际许可协议. Kindly fulfill the requirements of the aforementioned License when adapting or creating a derivative of this work.